Тестирование автомобильных навигационных систем
Введение
Навигационные решения, работающие по сигналам глобальных навигационных спутниковых систем (ГНСС), все шире используются на автомобильном транспорте различных видов. Разнообразные приемники ГНСС, часто именуемые системами спутниковой навигации, сегодня получили распространение как на автомашинах, используемых для личных целей, так и на коммерческом и общественном транспорте. Одни автомобильные навигационные системы основаны только на технологиях ГНСС, а другие являются комбинированными решениями, в которых аппаратура спутниковой навигации сочетается с инерциальной навигационной системой (ИНС).
В условиях все более широкого применения аппаратуры спутниковой навигации и повышения ее роли в деятельности многих людей и организаций (в том числе для обеспечения безопасности на транспорте и достижения коммерческого успеха) разработчики, производители и потребители этой аппаратуры должны знать, что можно ожидать от ГНСС. А для этого нужно понимать ограничения, присущие технологиям ГНСС, и проблемы, с которыми можно столкнуться при использовании этих технологий.
В настоящем документе рассмотрен ряд основных источников ошибок в определении местоположения приемника ГНСС. Одни из них характерны именно для автомобильных навигационных систем, а другие свойственны любым средствам спутниковой навигации. Кроме того, здесь описаны тестовые решения компании Spirent, обеспечивающие управляемую и повторяемую имитацию условий эксплуатации автомобильных навигационных систем. С помощью этих решений можно должным образом протестировать приемник ГНСС или комбинированную инерциально-спутниковую систему (ГНСС + ИНС) на пригодность к использованию на автомобильном транспорте.
Затенение антенны автомобильного приемника ГНСС
Приемник ГНСС лучше всего работает при соблюдении условия прямой видимости спутников ГНСС, передающих дальномерные и навигационные сигналы. Но при езде на автомобиле данное условие часто не соблюдается, что крайне негативно влияет на возможность и точность измерения псевдодальности до спутников ГНСС. Поскольку это измерение является основой спутниковой навигации, любые проблемы с его выполнением приводят к снижению точности местоположения, скорости движения и времени, определяемых приемником.
В среде, окружающей автомобиль, может быть множество объектов, нарушающих условие прямой видимости и тем самым препятствующих попаданию сигналов ГНСС на антенну приемника ГНСС. Это называют затенением антенны. Ниже представлены основные объекты, которые могут затенять антенну автомобильного приемника ГНСС.
Придорожные здания. Имеются в виду любые строения, примыкающие к проезжей части, которые перекрывают прямую видимость между антенной приемника ГНСС и навигационными спутниками.
Мосты. Длительность блокирования сигналов ГНСС мостом зависит от его физических характеристик и скорости движения автомобиля.
Туннели. При проезде на автомобиле по туннелю происходит полное затенение антенны приемника ГНСС.
Подземные и многоэтажные автомобильные парковки. Они влияют на работу приемника ГНСС примерно так же, как туннели. Пользователей волнует отсутствие навигационной информации при выезде с такой парковки, когда нужно быстро выбрать правильный маршрут дальнейшего движения.
Выемки. Дороги нередко прокладываются в выемках. В них может не выполняться условие прямой видимости некоторых спутников с небольшими углами места.
Естественный рельеф местности и растительность (холмы, горы, впадины, деревья и другая растительность). Затенять антенну автомобильного приемника ГНСС могут и неровности рельефа местности, а также растительность. Холмы, горы и впадины могут блокировать сигналы ГНСС в зависимости от своей высоты или глубины. Деревья и другие растения ослабляют сигналы ГНСС или полностью блокируют их в зависимости от своего типа, плотности расположения, содержания влаги, густоты листвы, расположения стволов и ветвей.
Движущиеся рядом и обгоняющие автомобили. Затенение зависит от их относительной скорости. Оно может быть кратковременным или длительным (например, когда высокая фура обгоняет легковой автомобиль, на котором установлен приемник ГНСС, двигаясь лишь не намного быстрее этого автомобиля).
Шоссейное оборудование (фонарные столбы, дорожные знаки, эстакады). Это оборудование создает периодическое затенение, вызывающее сложное искажение принимаемых сигналов.
Ошибки ГНСС
Помимо ошибок, вызываемых затенением антенны приемника ГНСС, существуют также ошибки в работе самой глобальной спутниковой навигационной системы, состоящей из группировки спутников и подсистемы контроля и управления. Эти ошибки не рассматриваются в настоящем документе, однако их не следует игнорировать.
Ошибки приемника ГНСС
Сам приемник ГНСС также может быть источником ошибок. Современные приемники имеют множество цифровых приемных каналов. Рост степени интеграции кремниевых микросхем дает возможность выполнять все большее число операций одновременно, что уменьшает время первого определения местоположения (TTFF). Однако с увеличением производительности растет и уровень шумов. Новые модели приемников все еще подвержены действию таких классических источников ошибок, как шум МШУ, тепловой шум ФАПЧ/АПЧ, фазовый шум гетеродина, наложение спектров (алиасинг) при аналогово-цифровом преобразовании сигналов. Для обычного современного приемника характерна систематическая ошибка менее 0,5 м (1σ) и ошибка из-за шума менее 0,2 м.
Комбинированные инерциально-спутниковые навигационные системы (ГНСС + ИНС)
Инерциально-спутниковые системы все шире используются на автомобильном транспорте. Основная причина этого — возникновение вышеназванных проблем и ошибок при осуществлении спутниковой навигации. Эти ошибки не могут быть полностью устранены даже при использовании оптимизированного приемника ГНСС.
Во многих инерциально-спутниковых системах навигация осуществляется в основном с использованием сигналов, получаемых от автомобильных датчиков (одометров, колесных датчиков АБС, гироскопа и т. д.), а информация о местоположении, скорости и времени, предоставляемая приемником ГНСС, используются в качестве эталона для регулярной коррекции растущих погрешностей позиционирования, характерных для ИНС.
Классическая проблема в работе автомобильных навигационных систем связана с движением автомобиля по криволинейному туннелю. В работе приемника ГНСС может произойти сбой, если на выходе из туннеля автомобиль будет двигаться не в том направлении, в каком он двигался, въезжая в туннель. При наличии ИНС в составе навигационного решения данные от колесных датчиков или гироскопа корректируют информацию о направлении движения при отсутствии сведений, получаемых от приемника ГНСС. Подсистема ИНС обеспечивает навигацию на всем протяжении туннеля и вне его, а также в других местах, где недоступны сигналы ГНСС (например, на подземных автомобильных парковках).
Ошибки ИНС
Хотя комбинированная инерциально-спутниковая навигационная система решает множество проблем, присущих навигационной системе, основанной только на технологиях ГНСС, она все же подвержена ошибкам, искажающим выдаваемую навигационную информацию.
Это особенно верно в отношении коммерческих автомобильных навигационных систем, где используются более дешевые и менее точные устройства вместо дорогостоящих высокоточных датчиков, применяемых в авиационной отрасли. В некоторых случаях использование колесных датчиков является единственным способом вычислить скорость изменения курса, поскольку трехмерные гироскопы слишком дороги.
Типичные источники ошибок:
- Пробуксовка колес. Колесный датчик отправляет импульсы навигационной системе с частотой, зависящей от скорости вращения колеса. Если колесо теряет контакт с землей и проскальзывает, частота следования импульсов возрастает и перестает соответствовать пройденному расстоянию. В результате возникает ошибка.
- Торможение. При торможении вращение колес замедляется или полностью останавливается, что приводит к уменьшению частоты следования импульсов или прекращению их передачи.
- Мертвая зона. В активных датчиках скорости вращения колеса используются преобразователи на эффекте Холла, которые не обнаруживают движения при скорости ниже минимальной (3–5 км/ч) — в так называемой мертвой зоне. Наличие мертвой зоны может создавать серьезные проблемы в городах, где при заторах на улицах автомобили движутся очень медленно. В таких условиях реализуемые в навигационных системах алгоритмы счисления пути не выдают правильных результатов.
- Заедание гироскопа. Гироскоп — это механическое устройство, которое может отказать или работать ненадлежащим образом. Гирокомпасы выдают разницу между фиксированной ориентацией гироскопа и направлением движения автомобиля. В случае заедания гироскопа (например, при поломке подвеса) в навигационную систему будут подаваться некорректные сигналы.
Возможности имитации условий эксплуатации приемников ГНСС на автотранспорте
Имитатор сигналов ГНСС воспроизводит условия эксплуатации приемника ГНСС, установленного на движущемся транспортном средстве. Для этого имитатор моделирует движение транспортного средства и спутников ГНСС, характеристики их сигналов, атмосферные и другие эффекты согласно сценарию тестирования. Данный функционал позволяет тестировать приемники ГНСС и комбинированные инерциально-спутниковые навигационные системы на пригодность к использованию на автотранспорте.
Касательно ошибок, рассмотренных в предыдущем разделе, важно отметить, что имитировать ошибки приемника не нужно, поскольку тестируемый приемник внесет собственные ошибки. Во всех рассмотренных здесь тестах с использованием 12-канального имитатора Spirent GSS6700, работающего под управлением ПО SimGEN, имитируется наземное транспортное средство с одной GPS-антенной, принимающей сигналы GPS L1 C/A.
По сути своей имитация — это создание образа реального мира. Этот образ не может быть абсолютно точным. Но не следует думать, что для получения достоверных результатов тестирования приемников ГНСС нужна абсолютная точность воспроизведения реальных условий их эксплуатации. Более чем 25-летняя практика тестирования такого рода аппаратуры с использованием имитации влияющих на ее работу типичных факторов показала достаточно высокую точность определения ее предельных характеристик. Получаемые результаты позволяют разрабатывать и оптимизировать приемники ГНСС. Но еще важнее то, что имитатор обеспечивает абсолютную повторяемость сигналов, подаваемых на тестируемый приемник, полное управление генерацией этих сигналов и наличие детальной (вплоть до битов) информации о них. Это невозможно при использовании для тестирования реальных сигналов ГНСС.
На рисунке 1 представлена концепция тестирования навигационного устройства, реализуемая с использованием имитатора GSS6700.
 Рисунок 1. Концепция тестирования с помощью имитатора сигналов ГНСС
Рисунок 1. Концепция тестирования с помощью имитатора сигналов ГНССЗатенение антенны приемника ГНСС внешними объектами
В этом разделе будет рассмотрена имитация затенения антенны приемника ГНСС внешними (по отношению к автомобилю) физическими объектами, препятствующими приему сигналов ГНСС.
Придорожные здания и выемки
Имитация затенения антенны приемника ГНСС придорожными зданиями осуществляется с помощью функциональной возможности ПО SimGEN, позволяющей пользователю задавать последовательность вертикальных плоских прямоугольных преград по левую и правую сторону от автомобиля относительно направления его движения. Пользователь задает расстояние до преграды, а также ее высоту и ширину (выражается в виде длительности воздействия преграды). Затенение антенны автомобильного приемника ГНСС произойдет, если преграда окажется на линии прямой видимости между этой антенной и спутником ГНСС. Преграды, имеющие большую высоту и находящиеся рядом с автомобилем, блокируют больше сигналов ГНСС, чем менее высокие удаленные преграды. Сложность картины затенения можно увеличивать, добавляя дополнительные преграды различных размеров и форм.
Если процесс имитации запускать с разными установками времени и/или даты, характер затенения будет изменяться по причине изменения геометрического расположения спутников ГНСС. Таким образом в течение 12 часов (период обращения спутников ГНСС) можно провести серию испытаний со всевозможными вариантами затенения, создаваемого заданными преградами.
На рисунке 2 показаны вертикальные плоские преграды, расположенные справа от автомобиля (преграды, находящиеся слева, не показаны для наглядности изображения).
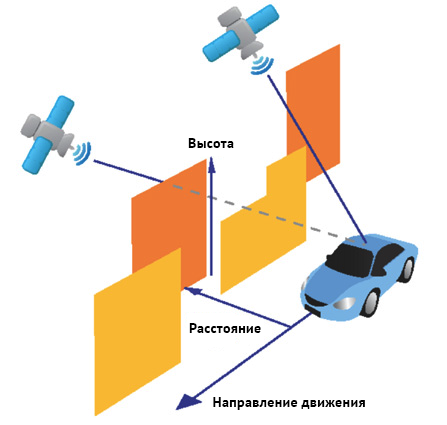 Рисунок 2. Концепция имитации затенения с помощью вертикальных плоских преград
Рисунок 2. Концепция имитации затенения с помощью вертикальных плоских преградПрограммное обеспечение SimGEN автоматически рассчитывает движение имитируемых спутников ГНСС и автомобиля и определяет, какие сигналы должны быть блокированы преградами (т. е. не будут выводиться имитатором).
Имитация затенения в выемках осуществляется так же, как и имитация затенения придорожными зданиями. В программном обеспечении SimGEN можно сымитировать блокировку сигналов, передаваемых спутниками с небольшими углами места, задав по обе стороны от автомобиля непрерывные вертикальные плоские преграды с высотой и удалением (от автомобиля), обеспечивающими тот же угол затенения, что и выемка. На рисунке 3 показаны правая и левая преграды, расположенные на расстоянии X (от автомобиля), имеющие высоту Y и создающие такое же затенение, какое происходит при реальном профиле выемки. На рисунке 3 в области голубого цвета затенения нет.
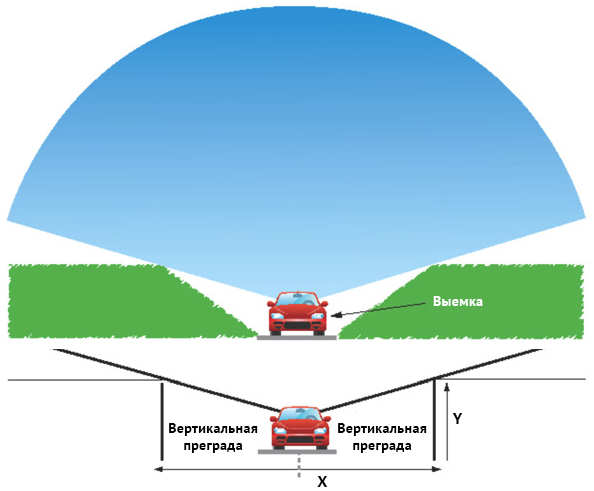 Рисунок 3. Пример затенения в выемке
Рисунок 3. Пример затенения в выемкеМосты
Программное обеспечение SimGEN имитирует затенение мостом путем выключения спутниковых сигналов на определенный период времени. Этот период характеризует влияние моста на прием сигналов ГНСС. Спутниковые сигналы можно выключать в реальном масштабе времени, используя окно управления мощностью в интерфейсе ПО SimGEN. Также эти сигналы можно выключать с помощью командного файла или системы удаленного управления, если она используется для управления имитатором.
Туннели и крытые автомобильные парковки
Подобно имитации затенения мостом, недоступность сигналов ГНСС в туннелях и на крытых автомобильных парковках имитируется путем выключения сигналов всех спутников, но на более длительный период времени, в течение которого транспортное средство может изменить направление своего движения (например, если имитируется движение по непрямому тоннелю).
Рельеф местности
Функция Terrain obscuration (затенение рельефом) в ПО SimGEN позволяет имитировать всенаправленное затенение антенны автомобильного приемника ГНСС рельефом местности согласно профилю рельефа, который моделируется в соответствии с редактируемыми наборами данных. В описании свойств рельефа есть поля Minimum height (минимальная высота) и Maximum height (максимальная высота). Текущая высота преграды псевдослучайным образом выбирается между этими граничными значениями по завершении каждого периода ширины преграды.
Для большего реализма имитации затенения в описании свойств рельефа есть поля Minimum width (минимальная ширина) и Maximum width (максимальная ширина). Ширина очередной преграды выбирается случайным образом, а период действия данной преграды зависит от скорости автомобиля. При имитации движения автомобиля с разными скоростями по определенной траектории профиль затеняющего рельефа повторяется с соответствующей скоростью.
Затенение рельефом местности является всенаправленным, поскольку по всем горизонтальным направлениям сымитированная преграда находится на одинаковом расстоянии от автомобиля. То есть она расположена по окружности, в центре которой находится автомобиль. Вне зависимости от скорости имитируемого движения по заданной траектории автомобиль остается в центре «окружности рельефа». Этот принцип показан на рисунке, где также приведено детальное описание рельефа для одного периода ширины преграды.
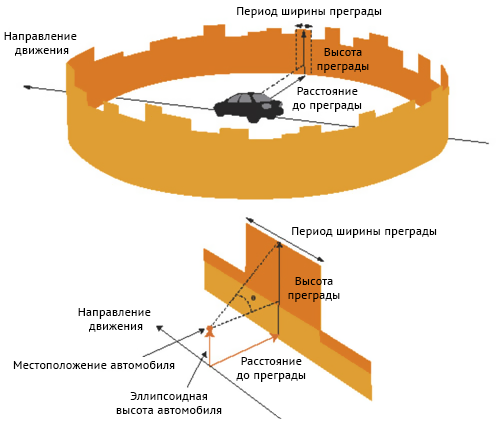 Рисунок 4. Всенаправленное затенение рельефом
Рисунок 4. Всенаправленное затенение рельефомДвижущиеся рядом и обгоняющие автомобили, шоссейное оборудование
Затенение этими объектами имитируется с помощью вертикальных плоских преград. Несмотря на то, что влияние (на прием сигналов ГНСС) приближающихся, обгоняющих и удаляющихся автомобилей, а также фонарных столбов и дорожных указателей точно не моделируется, удается получать достоверные результаты тестирования. Дело в том, что, как уже говорилось, точное моделирование не является необходимым условием для измерения предельных характеристик приемника ГНСС с достаточно высокой точностью.
Для имитации затенения обгоняющими автомобилями, такими как грузовики с высокими бортами, используется вертикальная плоская прямоугольная преграда подходящей высоты, удаленная на нужное расстояние. Аналогично, чтобы сымитировать затенение шоссейным оборудованием, задаются вертикальные плоские преграды с соответствующими (этому оборудованию) формами и размерами.
Затенение антенны приемника ГНСС внутри автомобиля
До настоящего момента мы рассматривали внешние (по отношению к автомобилю с приемником ГНСС) физические преграды, действие которых изменяется при движении автомобиля. Затенение антенны приемника ГНСС внутри автомобиля почти во всех случаях неизменно и не зависит от его движения. Таким образом, самым лучшим методом имитации этого вида затенения является использование редактора диаграммы направленности антенны (Antenna Pattern Editor) в программном обеспечении SimGEN. Имитатор принимает антенну приемника ГНСС за точку, в которой происходит моделирование сигналов. Все значения псевдодальности, мощности сигналов, их задержки и т. д. моделируются относительно этой точки. Электрические характеристики антенны определяются ее диаграммой направленности, но в случае установки приемника ГНСС в автомобиле на нее влияет затенение антенны элементами кузова автомобиля.
Ориентация диаграммы направленности антенны приемника ГНСС всегда неизменна по отношению к ориентации автомобиля, так как эта антенна зафиксирована в нем или на нем.
Редактор диаграммы направленности антенны позволяет задавать снижение уровня мощности сигнала и задержку по фазе для углов места от -90° до +90° и всех азимутальных направлений (360° по азимуту). Диаграмма направленности описывается с шагом до 1° по углу места и азимуту, что позволяет моделировать затенение, создаваемое элементами кузова автомобиля (дверьми, дверными стойками, крышей и т. д.), и определять области, где антенна «видит» небо (боковые окна, лобовое стекло, прозрачный люк в крыше). При этом может быть учтено ослабление сигнала из-за тонировки стекол и наличия на них нагревательных элементов.
На рисунке 5 показано окно редактора диаграммы направленности антенны (с трехмерным представлением этой диаграммы) при блокировке сигнала элементами кузова автомобиля. Такая картина блокировки может быть, когда приемник ГНСС установлен на приборной панели автомобиля.
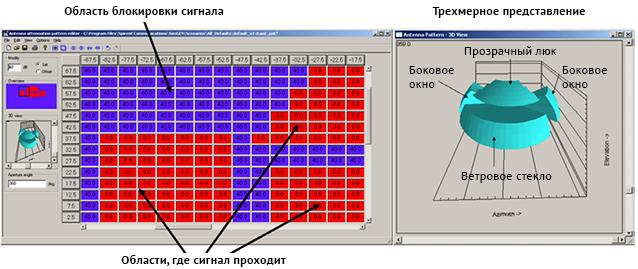 Рисунок 5. Редактор диаграммы направленности антенны
Рисунок 5. Редактор диаграммы направленности антенныИмитация многолучевого распространения сигналов ГНСС
Существует ряд методов имитации многолучевого распространения сигналов ГНСС с помощью ПО SimGEN. Некоторые из методов позволяют реализовать сложную картину многолучевости. Речь идет о следующих методах:
- Fixed offset.
- Ground reflection.
- Doppler offset.
- Reflection pattern.
- Vertical planе.
- Polynomial.
- Legendre.
- Sinusoidal.
- Land mobile.
В настоящем документе рассматриваются два метода имитации многолучевого распространения: Fixed offset и Vertical plane.
Fixed offset
Это простейший метод имитации многолучевого сигнала, позволяющий для конкретного имитируемого спутника задать точную копию его прямого (LOS) сигнала. Для данной копии, представляющей собой отраженный сигнал, можно указать разность псевдодальности (удлинение пути следования) в метрах и снижение уровня мощности в децибелах по отношению к прямому сигналу. После этого имитатор, используя отдельный аппаратный канал, будет генерировать данный отраженный сигнал. Разность псевдодальности всегда положительна, поскольку отраженный сигнал проходит большее расстояние до приемника, чем прямой сигнал. Уровень мощности отраженного сигнала может быть либо такой же, как у прямого сигнала, либо ниже, что обозначает потери при отражении.
Пользователь может задавать отраженные лучи либо в реальном масштабе времени (с помощью графического интерфейса ПО SimGEN или средств удаленного управления), либо до запуска сценария. Соответствующие команды могут быть записаны в файл User Actions.
Приемник без подавления многолучевости пытается отслеживать оба сигнала (прямой и отраженный), поскольку не может определить, какой из них является основным, и измеряет псевдодальность с ошибкой. Пользователь может оценить работоспособность приемника в условиях многолучевости путем уменьшения мощности имитируемого отраженного сигнала до тех пор, пока коррелятор не перестанет отслеживать этот нежелательный сигнал.
Vertical plane
Ранее была рассмотрена возможность использования вертикальных плоских преград для имитации затенения антенны приемника ГНСС. Эти же плоские фигуры, выступающие в роли городских зданий, могут быть использованы в рамках метода Vertical plane для геометрического моделирования отражений спутниковых сигналов от поверхностей знаний. Для заранее заданных многолучевых сигналов ПО SimGEN рассчитывает возможность отражения на основе взаимного геометрического расположения выбранных спутников, автомобиля и отражающих поверхностей. В зависимости от этого геометрического расположения антенна приемника может «видеть» только прямой сигнал, прямой и отраженный сигналы, только отраженный сигнал или «не видеть» вообще никаких сигналов. При использовании сложных плоских фигур и имитации движения автомобиля создается более сложная картина многолучевости. Важно, что любая комбинация имитируемых сигналов, даже очень сложная, будет точно повторяться в каждом тесте. На рисунке 6 показан пример имитации многолучевого распространения спутникового сигнала с помощью вертикальных плоских фигур.
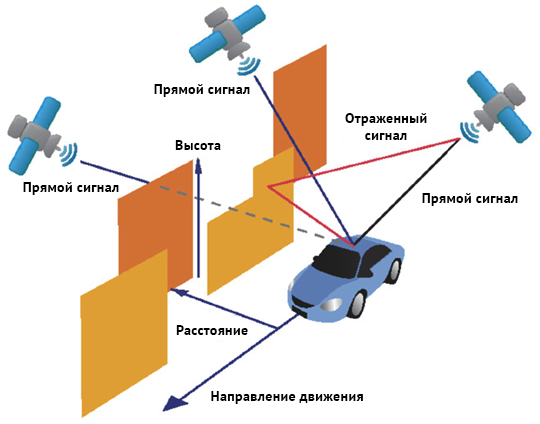 Рисунок 6. Имитация многолучевости с помощью вертикальных плоских фигур
Рисунок 6. Имитация многолучевости с помощью вертикальных плоских фигурЧувствительность приемника ГНСС
От чувствительности приемника ГНСС зависит, насколько хорошо он может отслеживать спутниковые сигналы. Очень чувствительные приемники способны отслеживать слабые сигналы лучше, чем это делают приемники с низкой чувствительностью.
Обычно наиболее важными являются два параметра чувствительности: чувствительность для захвата (acquisition sensitivity) и чувствительность для слежения (tracking sensitivity).
Чувствительность для захвата — это параметр, характеризующий минимальную мощность принимаемого сигнала ГНСС, при которой приемник способен распознать его среди шумов (то есть распознать код).
Чувствительность для слежения — это параметр, характеризующий минимальную мощность принимаемого сигнала ГНСС, при которой приемник способен отслеживать его и определять азимут и угол места спутников. Как правило, значение данного параметра ниже, чем чувствительность для захвата.
Программное обеспечение SimGEN позволяет управлять уровнем мощности имитируемого сигнала с высокой точностью и в широком динамическом диапазоне. Управление уровнем мощности может осуществляться в реальном масштабе времени в процессе выполнения сценария или с помощью заранее написанного набора команд сценария. Управление в реальном масштабе времени выполняется посредством графического пользовательского интерфейса ПО SimGEN или удаленных команд (если имитатор управляется дистанционно).
Можно управлять уровнями мощности сигналов каждого спутника в отдельности или всех спутников сразу. При этом уровни мощности могут быть отображены в абсолютных значениях или по отношению к опорной величине. Точность регулировки уровня мощности в имитаторе GSS6700 составляет 0,1 дБ в диапазоне шириной 35 дБ (-20 дБ, +15 дБ относительно номинального уровня, который для GPS-сигнала составляет -130 дБм). Это дает возможность точно определять чувствительность для захвата, чувствительность для слежения и другие базовые параметры приемника, например время первого определения местоположения при холодном, теплом или горячем старте. Более полная информация об основных характеристиках приемника ГНСС представлена в документе «Тестирование основных характеристик приемника ГНСС».
В настоящем документе ранее отмечалось, что редактор диаграммы направленности антенны приемника ГНСС может быть использован для имитации затенения антенны приемника ГНСС элементами кузова автомобиля. Этот же редактор может быть использован и для имитации ослабления сигнала внешними (по отношению к автомобилю) объектами. Поскольку ПО SimGEN позволяет задавать до четырех разных диаграмм направленности, можно взять базовую диаграмму, описывающую затенение антенны внутри автомобиля, и на ее основе создать модифицированную диаграмму, добавив дополнительное ослабление сигнала при определенных углах места и азимутальных направлениях для имитации, например, устанавливаемых вдоль дорог шумозащитных экранов. В сценарии можно задать переключение с базовой диаграммы направленности на модифицированную и обратно в определенные моменты времени.
На рисунке 7 показано влияние шумозащитных экранов, установленных вдоль автострады, на уровень мощности принимаемого сигнала. Действие этих экранов отражается на диаграмме направленности антенны.
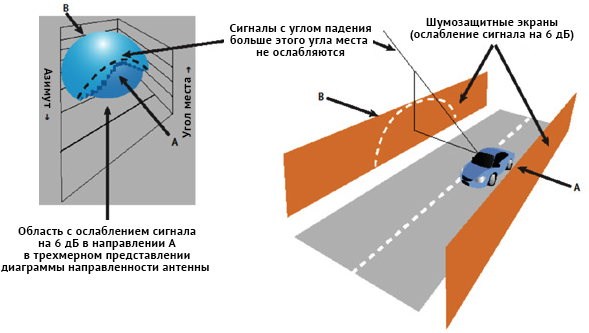 Рисунок 7. Ослабление сигнала шумозащитными экранами и соответствующая диаграмма направленности антенны
Рисунок 7. Ослабление сигнала шумозащитными экранами и соответствующая диаграмма направленности антенныПроверка автомобильного приемника ГНСС на устойчивость к радиопомехам
Имитаторы моделей GSS6700 и GSS9000 имеют входной порт для подачи радиопомехи. Это дает возможность ввести внешний радиосигнал в тракт, по которому передается сымитированный сигнал ГНСС (для этого в имитаторе предусмотрен направленный ответвитель). В зависимости от характеристик введенного сигнала помехи нормальная работа приемника ГНСС может быть нарушена.
Сигнал помехи, подаваемый от внешнего генератора другого производителя, не является когерентным с имитируемым сигналом ГНСС. Однако имитаторы GSS9000 и GSS6700 могут быть снабжены опциональной системой имитации помех GSS7765. Данная система обеспечивает управление определенными генераторами сигналов с помощью ПО SimGEN. Благодаря этому, могут выдаваться когерентные и некогерентные сигналы с различными видами модуляции и регулируемым уровнем мощности, что позволяет учитывать влияние расстояния от приемника ГНСС до источника помехи.
На рисунке 8 показан подход к тестированию приемника ГНСС на устойчивость к радиопомехам с вводом сигнала помехи в имитатор.
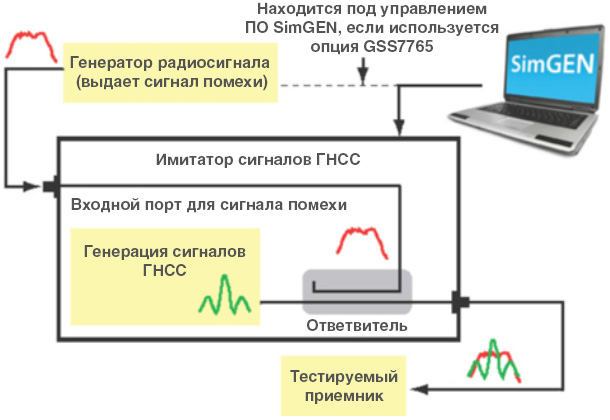 Рисунок 8. Поход к тестированию приемника ГНСС с добавлением радиопомехи
Рисунок 8. Поход к тестированию приемника ГНСС с добавлением радиопомехиТестирование инерциально-спутниковых систем с использованием опции SimAUTO
Имитаторы Spirent, управляемые программным обеспечением SimGEN, имеют опцию SimAUTO. Эта опция обеспечивает имитацию сигналов автомобильных датчиков счисления пути.
Опция SimAUTO состоит из модуля Windows DLL для интеграции с ПО SimGEN и плат ввода-вывода (цифровой и цифроаналоговой), устанавливаемых в хост-компьютер, на котором функционирует ПО SimGEN. В комплект поставки также входят сигнальные кабели и кабели для передачи данных.
С помощью опции SimAUTO генерируются следующие имитационные сигналы:
Vehicle Heading Rate (угловая скорость изменения курса автомобиля). Это биполярный аналоговый сигнал, который может быть использован для имитации сигнала от датчика угловой скорости гироскопа. Напряжение этого сигнала пропорционально угловой скорости, с какой автомобиль изменяет свой курс.
Vehicle Absolute Heading (курс автомобиля). Это биполярный аналоговый сигнал, который может быть использован для имитации сигнала от гироскопа или компаса. Напряжение этого сигнала соответствует курсу автомобиля.
Turntable Control (сигналы для управления поворотным столом). Вместо имитации сигналов датчиков можно, соблюдая меры предосторожности, задействовать встроенные в навигационное устройство датчики, поместив это устройство на поворотный стол. Опция SimAUTO поддерживает такой способ тестирования навигационной аппаратуры посредством набора калибровочных процедур, помогающих определять подходящие масштабные коэффициенты и сдвиги по постоянному току. Выдаются аналоговые сигналы напряжения, определяющие скорость вращения поворотного стола и его ориентацию.
Digital Speed Pulses (скорость и курс автомобиля). Семь цифровых выходов (на плате в составе SimAUTO) предназначены для имитации сигналов, информирующих о скорости автомобиля. Четыре из этих выходов могут быть задействованы для выдачи сымитированных сигналов независимых датчиков скорости вращения колеса. Ниже в таблице показано предназначение всех семи выходов.
|
Выход
|
Сигнал
|
|
1
|
Скорость центра автомобиля
|
|
2
|
Показания одометра передних колес (скорость определяется усреднением по двум передним колесам)
|
|
3
|
Показания одометра задних колес (скорость определяется усреднением по двум задним колесам)
|
|
4
|
Скорость вращения переднего левого колеса
|
|
5
|
Скорость вращения переднего правого колеса
|
|
6
|
Скорость вращения заднего левого колеса
|
|
7
|
Скорость вращения заднего правого колеса
|
Поступающие с представленных в таблице выходов сигналы имеют форму меандра (коэффициент заполнения 50%). Частота этих сигналов пропорциональна скорости вращения колеса и заданному пользователем коэффициенту масштабирования. Для каждого из семи сигналов может быть задан свой коэффициент масштабирования, но для сигналов, имитирующих работу четырех датчиков скорости вращения колеса, обычно используется один и тот же коэффициент масштабирования.
Опция SimAUTO способна имитировать различные события, нарушающие выдачу этих сигналов или приводящие к появлению ошибок в них.
События, имеющие отношение к скорости вращения колес. Можно сымитировать нулевую скорость вращения одного или нескольких колес, что имеет место при их блокировке. Также возможна имитация ускорения или замедления вращения колес, что происходит при их пробуксовке или частичном торможении. Кроме того, могут быть заданы алгоритмические ошибки, которые рассчитываются по формуле, предназначенной для имитации случайных и систематических погрешностей.
События, связанные с работой гироскопа. Можно сымитировать заедание гироскопа, его шум и смещение (постоянное или зависящее от температуры).
Сообщения шины CAN. SimAUTO может генерировать сообщения шины CAN в соответствии с «поведением» имитируемого датчика.
На рисунке 9 представлена общая схема функционирования опции SimAUTO совместно с имитатором сигналов ГНСС, работающим под управлением ПО SimGEN.
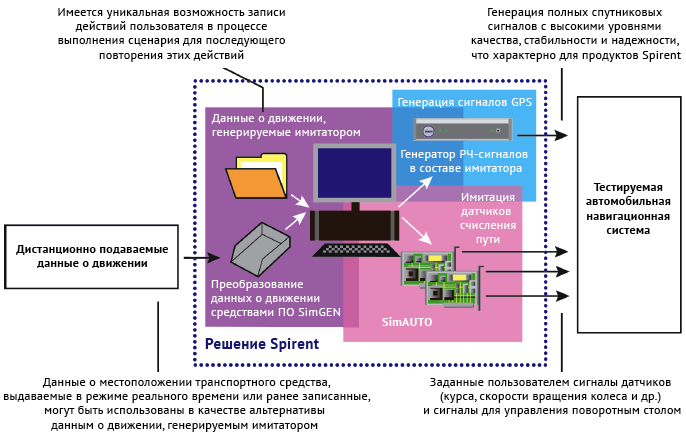 Рисунок 9. Общая схема функционирования SimAUTO
Рисунок 9. Общая схема функционирования SimAUTOВоспроизведение реальных полевых испытаний
Программное обеспечение SimGEN позволяет взять данные проведенных полевых испытаний и преобразовать их в файл движения, который может быть использован для имитации траектории движения автомобиля. Таким образом, не выходя из лаборатории, можно воспроизвести аналогичную поездку. Это очень полезная возможность, которая значительно уменьшает затраты времени и денег на проведение полевых испытаний (с проездом на автомобиле по заданному маршруту). Можно воспроизвести и блокировку сигнала (вследствие затенения антенны приемника) при использовании подходящих данных.
Сообщения NMEA 0183
Большинство приемников ГНСС выводят данные в формате NMEA, в котором предусмотрены сведения о местоположении, скорости, отношении сигнал/шум и др. Эти данные используются программным обеспечением, управляющим приемником, например для вывода информации о местоположении последнего на экран.
Утилита для преобразования сообщений NMEA
Преобразование сообщений NMEA осуществляется с помощью приложения SimPROCESS, которое входит в состав ПО SimGEN.
Приложение SimPROCESS представляет собой скомпилированное отдельное приложение MATLAB, которое использует среду выполнения MATLAB и совершенно бесплатно предоставляет пользователям ПО SimGEN широкие возможности анализа и визуализации данных.
Это приложение можно рассматривать как набор программных средств (утилит), использующих стандартный пользовательский интерфейс для доступа к любым инструментам SimPROCESS. Утилита преобразования данных NMEA в информацию о движении преобразует журнальный файл приемника, содержащий сообщения NMEA GGA, в файлы движения с расширением UMT, которые воспроизводит ПО SimGEN. Файл UMT содержит команды управления движением, выполняемые с интервалом в 100 мс.
Кроме того, эта утилита использует информацию о значениях отношения сигнал/шум (SNR), содержащуюся в сообщениях NMEA GSV, для воспроизведения уровней мощности спутниковых сигналов, поступающих на антенну приемника. Это позволяет смоделировать реальное полевое тестирование, где происходило затенение антенны приемника, что было отражено в GSV-сообщении в составе записанных в журнал данных (а значит, может быть воспроизведено имитатором). Таким образом можно повторить любое затенение, встретившееся на реальном маршруте, без использования функций моделирования затенений в ПО SimGEN.
Основным недостатком этого подхода следует считать тот факт, что имитируемая траектория не всегда точно совпадает с истинным местоположением приемника, которое было при записи данных NMEA, поскольку приемник работает в реальных условиях, снижающих точность навигации, и возможны ошибки в сигналах ГНСС. Впрочем, можно вручную корректировать данные NMEA для устранения наиболее очевидных ошибок (и компания Spirent рекомендует это делать). Приложение SimGEN точно конвертирует данные NMEA, независимо от их первоначальной точности.
Важным моментом является то, что один и тот же процесс имитации можно выполнять необходимое число раз. И хотя данные NMEA могут быть неточны по отношению к реальному маршруту, имитируемая траектория точно повторяется в разных испытаниях. В ряде случаев полезно иметь возможность использовать неточную, но повторяемую траекторию. Во многих автомобильных спутниковых навигационных системах применяются функции привязки к дороге. Эти функции можно тестировать и оптимизировать, используя неточные траекторные данные.
Заключение
Надлежащее тестирование навигационной аппаратуры потребителей на этапах ее разработки, интеграции и производства имеет большое значение для обеспечения и доказательства пригодности этой аппаратуры к эксплуатации в заданных условиях. В настоящем документе рассмотрен ряд основных проблем с применением приемников ГНСС на автомобильном транспорте. Показаны возможности использования имитаторов сигналов ГНСС для выполнения точных тестов с моделированием этих проблем. С помощью имитатора данные проблемы можно воспроизводить поочередно, в любой комбинации или все вместе при полном управлении параметрами имитации. Описанные здесь подходы к тестированию повышают его эффективность, обеспечивают максимальное соответствие процедур тестирования предназначению разрабатываемых продуктов, ускоряют их разработку.
наверх