Тестирование основных характеристик приемника ГНССПрименение глобальных навигационных спутниковых систем (ГНСС) неуклонно расширяется. Эти системы играют все более значимую роль в деятельности многих людей и организаций. При таких тенденциях разработчики, производители и потребители приемников ГНСС должны иметь четкое представление об их реальных возможностях, а также понимать ограничения и проблемы, связанные с использованием технологий ГНСС. В настоящем документе рассмотрены основные характеристики приемников ГНСС и описаны решения компании Spirent для комплексного тестирования этих устройств. Кроме того, здесь показаны возможности имитаторов сигналов ГНСС по реализации требуемых условий тестирования приемников ГНСС. Процедура тестирования определяется спецификой применения приемников ГНСС, от нее же зависит степень важности тех или иных параметров этих устройств. Например, малое время первого определения местоположения (Time To First Fix, TTFF) может быть критично для автомобильных приемников ГНСС, но необязательно для аппаратуры спутниковой навигации, используемой в процессе статической геодезической съемки. Быстрый повторный захват сигналов ГНСС (после временного прекращения их приема) не имеет большого значение для судового приемника ГНСС, поскольку затенение его антенны Возможности имитации сигналов ГНССИмитатор сигналов ГНСС воспроизводит условия эксплуатации приемника ГНСС, установленного на движущемся транспортном средстве. Для этого имитатор моделирует движение транспортного средства и спутников ГНСС, характеристики их сигналов, атмосферные и другие эффекты согласно сценарию тестирования. По сути своей имитация — это создание образа реального мира. Этот образ не может быть абсолютно точным. Но не следует думать, что для получения достоверных результатов тестирования приемников ГНСС нужна абсолютная точность воспроизведения реальных условий их эксплуатации. Более чем На рисунке 1 представлена концепция тестирования приемника ГНСС, реализуемая с использованием имитатора GSS6700.  Рисунок 1. Информационные потоки при тестировании с помощью имитатора сигналов ГНСС Все рассмотренные в настоящем документе тесты без имитации радиопомех могут быть выполнены с помощью имитатора сигналов ГНСС GSS9000, GSS6700 или GSS6300M компании Spirent. В тестах на уязвимость приемника ГНСС к радиопомехам используются имитаторы GSS9000 и GSS6700. Для генерации сценариев тестирования и управления имитатором GSS6700 или GSS9000 предназначено программное обеспечение (ПО) SimGEN. Создание сценариев тестирования для имитатора GSS6300M и их выполнение данным имитатором обеспечивает ПО SimCHAN. Основные рабочие характеристики приемника ГНССВ данном документе основное внимание уделяется тестированию ключевых рабочих характеристик приемников ГНСС. Если не указано иное, имитируются сигналы типа GPS L1 С/A. TTFF при холодном стартеПараметр TTFF (время первого определения местоположения) характеризует быстроту, с какой приемник выполняет процесс поиска сигнала ГНСС для его захвата. На скорость выполнения этого процесса влияют два фактора, один из которых связан с кодом C/A (псевдослучайный дальномерной код), а другой — с доплеровским сдвигом частоты несущей. В процессе поиска сигнала при холодном старте сдвиг кода составляет до 1023 чипов (общее число фазовых состояний кода C/A в сигнале GPS), а уход частоты вследствие эффекта Доплера — ±11 кГц. Одни приемники используют алгоритм последовательного, а другие — параллельного ( Согласно [1], TTFF при холодном старте — это время, которое проходит с момента включения приемника ГНСС до первой выдачи правильных координат при следующих условиях:
Поскольку процесс поиска имеет вероятностный характер, делают ряд измерений времени TTFF (в [1] рекомендуется выполнить 20 измерений) при различных вариантах геометрического расположения спутников, после чего усредняют полученные результаты. Использовать имитатор для тестирования TTFF при холодном старте очень просто. Сначала создайте сценарий имитации неподвижного транспортного средства при уровнях мощности спутниковых сигналов на антенном входе приемника, равных -120 дБм. Запустите этот сценарий (перед этим приемник должен быть подсоединен к имитатору) и включите приемник. После первой выдачи координат остановите выполнение сценария, вернитесь к началу его выполнения и переведите время сценария не менее, чем на 8 часов вперед для имитации другого геометрического расположения видимых спутников. Это же можно обеспечить, задав новое местоположение имитируемого транспортного средства, удаленное на несколько тысяч километров от старого. Очистите память приемника от всех навигационных данных и временной информации, а затем выключите его. Запустите измененный сценарий и снова включите приемник. Зафиксируйте время TTFF. Повторите эту процедуру необходимое число раз, а затем на основе полученных результатов вычислите среднее значение времени TTFF. Если вы не уверены, что память приемника очищается полностью, при изменении сценария задавайте весьма удаленные новые местоположения и/или моменты времени с разницей во много лет. В этом случае, даже если приемник сохраняет некие навигационные данные, они не будут использованы. TTFF при теплом стартеСогласно [1], TTFF при теплом старте — это время, которое проходит с момента включения приемника ГНСС до первой выдачи правильных координат при следующих условиях:
Для тестирования этого параметра можно использовать тот же самый сценарий, который создавался для определения TTFF при холодном старте, поскольку выполнение условий теплого старта (например, удаление данных эфемерид, но не альманаха) обеспечивается с помощью приемника. Если возможность удалить только данные эфемерид отсутствует, сначала следует дать приемнику возможность загрузить альманах из полного навигационного сообщения (эта операция занимает примерно 12,5 мин). После этого переведите время сценария и приемника на 4 часа вперед (чтобы эфемериды устарели). TTFF при горячем стартеСогласно [1], TTFF при горячем старте — это время, которое проходит с момента включения приемника ГНСС до первой выдачи правильных координат при следующих условиях:
Для тестирования этого параметра можно задействовать тот же самый сценарий, который использовался для определения TTFF при теплом старте. Но в процессе тестирования не нужно будет очищать память приемника и останавливать выполнение сценария для изменения Чувствительность для захвата (аcquisition sensitivity)Параметр, характеризующий минимальную мощность принимаемого сигнала, при которой приемник ГНСС может захватить его и выполнить первое определение своего местоположения. Значение этого параметра измеряют при холодном, теплом и горячем стартах. Для тестирования этого параметра с помощью имитатора можно использовать простой статический сценарий. ПО имитатора позволяет управлять уровнем мощности имитируемых сигналов различными способами, с высокой точностью и в широком динамическом диапазоне. Управление уровнем мощности может осуществляться в реальном масштабе времени в процессе выполнения сценария или с использованием заранее заданного набора команд сценария. Управление в реальном масштабе времени может выполняться с помощью графического пользовательского интерфейса ПО SimGEN или удаленных команд (если имитатор управляется посредством системы удаленного управления). Можно управлять уровнями мощности сигналов каждого спутника в отдельности или всех спутников сразу. При этом уровни мощности могут быть отображены в абсолютных значениях или по отношению к опорной величине. Точность регулировки уровня мощности в имитаторе GSS6700 составляет 0,1 дБ в диапазоне шириной 35 дБ (-20 дБ, +15 дБ относительно номинального уровня, который для Чувствительность для слежения (tracking sensitivity)Этот параметр характеризует уровень сигнала, нужный, чтобы приемник мог поддерживать его захват. Порог слежения тесно связан с погрешностями измерений вследствие ошибок в системе фазовой автоподстройки частоты приемника. К основным видам ошибок относятся фазовая ошибка, динамическая ошибка и ошибка, обусловленная тепловыми шумами. Минимизация ошибок позволит приемнику продолжать отслеживать сигналы при значительно сниженном уровне мощности. В любом случае порог слежения должен быть меньше чувствительности для захвата. В процессе тестирования с помощью имитатора нужно одновременно понижать уровни мощности сигналов всех спутников, пока приемник не потеряет сигналы. Испытания следует повторять при различных комбинациях имитируемых спутников и вариантах их геометрического расположения. Время повторного захвата (reacquisition time).Данный параметр характеризует время, нужное приемнику для возобновления выдачи точных координат после временной потери всех принимаемых сигналов ГНСС. Короткое время повторного захвата имеет большое значение для автомобильных навигационных систем. Представьте себе автомобиль, выезжающий из туннеля, в котором автомобильная навигационная система потеряла все спутниковые сигналы. Недалеко от конца туннеля находится перекресток. Данная система должна быстро возобновить свою работу, чтобы своевременно порекомендовать повернуть в нужную сторону. Для тестирования времени повторного захвата с использованием имитатора мощность сигнала всех спутников должна быть снижена не менее чем на 60 дБ. Лучший способ выполнения этого — задать параметр off для каждого спутника. ПО SimGEN позволяет «выключить» все спутники в процессе выполнения сценария. С помощью SimGEN можно создать файл пользовательских действий с упорядоченным по времени списком команд. Одна из них — команда Power On/Off (вкл./выкл. сигнала). Длительность «выключения» спутников должна быть такой, чтобы приемник перестал отслеживать их сигналы. Это нужно для инициирования повторного захвата их сигналов. Точность статической навигации (Static Navigation Accuracy)Под точностью статической навигации понимают точность, с которой неподвижный приемник способен определять свое местоположение в сравнении с известными истинными координатами. Регламентируют три вида точности: Предсказуемая точность — это расхождение выданных приемником координат относительно его известных координат на карте. Измеренное местоположение приемника и его координаты на карте должны быть основаны на одной и той же геодезической информации. Повторяемая точность — с такой точностью пользователь может вернуться в точку, координаты которой были ранее измерены тем же самым приемником. Относительная точность — точность, с которой пользователь может измерить свое местоположение относительно местоположения другого пользователя, измеренного с помощью аналогичного приемника в то же самое время (различия в показаниях двух расположенных рядом приемников). Ожидаемая ошибка позиционирования (Estimated Position Error, EPE) определяется по следующей формуле: Перемножение HDOP × UERE × 2 дает значение EPE (2drms) (см. формулу 2). Это значение широко используется в качестве EPE (2drms) = 2 × HDOP × √(URE2 + UEE2) (2) Параметры HDOP, GDOP, PDOP и VDOP (снижение точности в горизонтальной плоскости, суммарное, по местоположению и в вертикальной плоскости) определяются текущим геометрическим расположением спутников, видимых выше угла затенения антенны приемника в вертикальной плоскости. Параметры DOP могут ухудшаться (становиться больше) если приему сигналов ГНСС мешают неровности рельефа, растительность, здания, элементы конструкции транспортного средства Параметр URE (User Range Error) характеризует ошибки, возникающие при передаче сигналов, и ошибки в самих передаваемых сигналах. Речь идет об ошибках в данных эфемерид и полученной информации о системном времени ГНСС, а также об ошибках, связанных с задержкой распространения сигналов ГНСС в ионосфере и тропосфере. Эти ошибки могут быть значительно уменьшены с помощью дифференциальной коррекции и многочастотных решений. Источниками дифференциальных поправок могут быть установленные пользователями опорные станции, общественные базовые станции, государственные радиомаяки, Параметр UEE (User Equipment Errors) характеризует ошибки измерения дальности в приемнике, обусловленные тепловыми шумами, а также ошибки, вызванные многолучевым распространением сигналов, неоптимальной ориентацией антенны, электромагнитными и радиочастотными помехами. Улучшением конструкции антенны и приемника можно значительно уменьшить составляющие UEE. Погрешность определения местоположения может варьироваться от десятков метров (при использовании приемников широкого потребления) до нескольких миллиметров (в случае применения геодезического оборудования). Эта ошибка зависит от используемых сигналов ГНСС, аппаратуры спутниковой навигации и правильности ее применения. Профессиональное топографическое и геодезическое оборудование обычно имеет возможности по установке пороговых значений ряда параметров, включая отношение сигнал/шум, угол затенения, DOP и др. Ниже представлена таблица ошибок для сигнала GPS L1 C/A. По информации из нее рассчитывают UERE.
При тестировании с помощью имитатора можно устранить ошибку UERE и некоторые ошибки UEE, отключив моделирование атмосферных эффектов и намеренно не предусмотрев в сценарии имитацию ошибок эфемерид и часов спутника, многолучевого распространения сигналов, а также электромагнитных и радиочастотных помех. Это нереализуемо при использовании реальных спутниковых сигналов. Поэтому невозможно физически измерить абсолютную точность навигации приемника без использования имитатора ГНСС. Для измерения точности статической навигации следует создать сценарий с неизменным расположением транспортного средства в точке с координатами 0° по широте и долготе и высотой 0 м. Эта точка удобна тем, что она позволяет легко отслеживать любые отклонения от нее, выраженные в числах, отличных от нуля. Следует выполнить как минимум Некоторые приемники имеют так называемый статический режим, в котором фиксируется местоположение приемника, когда скорость его движения становится ниже определенного порогового значения. Этот режим полезен для автомобильных приемников, поскольку он предотвращает «дрожание» показаний приемника, когда автомобиль неподвижен. Однако при тестировании точности статической навигации это режим необходимо отключить во избежание получения ложного хорошего результата. В документе [3] объясняется, как тестировать точность работы приемника. Точность динамической навигацииПод точностью динамической навигации понимают то же самое, что и под точностью статической навигации, за исключением того, что приемник перемещается по одной из осей — X, Y или Z — или сразу по трем этим осям. Для тестирования данной характеристики с помощью имитатора создайте сценарий с простой траекторией движения транспортного средства, заданной с помощью команд ПО SimGEN. Чтобы гарантировать отсутствие корреляции данных, проводите тесты в течение минимум трех временных интервалов продолжительностью не менее часа каждый. В каждом из интервалов должно быть не менее 1000 точек с истинными координатами. Эти три теста должны быть равномерно распределены по времени в течение Если нужно определить точность динамической навигации при Уязвимость к радиопомехамПод радиопомехами понимают любой нежелательный сигнал, который затрудняет работу приемника и тем самым приводит к частичному или полному прекращению навигации. Радиопомехи могут быть преднамеренными и непреднамеренными. Преднамеренные помехи — это результат умышленной попытки нарушить работу приемника ГНСС. В качестве примера подобных помех можно привести глушение радиосигналов противоборствующей стороной в ходе военных действий. Технически более сложным вариантом преднамеренных помех является спуфинг. Речь идет о передаче ложных сигналов ГНСС, заставляющих приемник «думать», что он находиться там, где его на самом деле нет. Непреднамеренные помехи — это случайные помехи, возникающие при работе различного радиотехнического оборудования. В качестве примеров этого типа помех и их источников можно назвать внеполосные излучения коммерческих станций телевещания или импульсные помехи от навигационных радиомаяков системы VOR/DME. Если говорить об уязвимости приемников ГНСС к помехам обоих типов, то в первую очередь следует упомянуть чрезвычайно малую мощность принимаемых сигналов ГНСС (обычно -120 дБм). Фактически мощность этих сигналов на 20 дБ ниже уровня фонового шума, что делает необходимым использование в приемнике обработки сигнала, дающей энергетический выигрыш. Такая обработка позволяет выделить сигнал из шума. В качестве примера уязвимости приемника ГНСС к помехам следует назвать тот факт, что немодулированный сигнал, передаваемый бортовым передатчиком помех мощностью 1 Вт на частоте L1 (1, 57542 ГГц), может нарушить слежение за сигналами в уже захватившем сигналы приемнике на удалении до 10 км от передатчика и воспрепятствовать захвату сигналов приемником на удалении до 85 км от передатчика [4]. Существует несколько вариантов проверки приемника ГНСС на уязвимость к помехам с помощью имитатора. Простую некогерентную помеху легко организовать при использовании имитаторов моделей GSS9000 и GSS6700, поскольку они имеют входной порт для подачи радиопомехи. Это дает возможность ввести внешний радиосигнал в тракт, по которому передается сымитированный сигнал ГНСС (для этого в имитаторе предусмотрен направленный ответвитель). Данный подход к тестированию показан на рисунке 2. 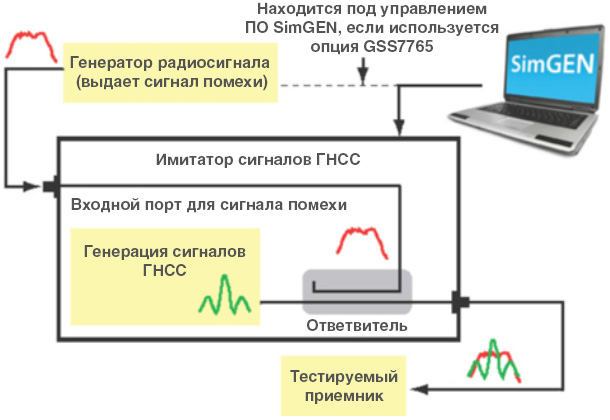 Рисунок 2. Типичный подход к тестированию приемника ГНСС с имитацией радиопомех Сигнал помехи, подаваемый от внешнего ЗаключениеВ настоящем документе рассмотрены основные рабочие характеристики приемников ГНСС. Эти характеристики должны быть оптимизированы на ранних стадиях разработки приемника. Для их оптимизации нужны подходящие средства тестирования. В данном документе показано, что с помощью имитатора сигналов ГНСС можно проводить тесты для определения основных характеристик приемника, без чего их невозможно оптимизировать. ПО SimGEN обеспечивает очень точное управление параметрами имитируемых сигналов. Также оно моделирует различные факторы, негативно влияющие на прием спутниковых навигационных сигналов. Данное ПО имеет простой в использовании интерфейс, с помощью которого удобно проводить тестирование. Не существует практичных альтернатив использованию имитатора, когда приемник нужно протестировать в условиях высокодинамичного движения. Литература1. ION STD 101 Recommended Test Procedures For GPS Receivers, [I.O.N]. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||